Разработан автономный пневматический робот, способный взбираться на наклонные поверхности. Для этого его обернули в узорчатую плёнку, которая напоминает шкуру змеи. Благодаря этому покрытию, робот не соскальзывает вниз и может толка себя вперёд.
В разработке используется небольшой воздушный насос, который расположен внутри тела робота. Само тело представляет собой эластичную трубку с кевларовым каркасом. В задней части также располагаются несколько плат и аккумулятор. Поверхность покрыта вырезами, выполненными по японской технике киригами. Во время надувания трубки робота вырезы на этой поверхности отклоняются и начинают выступать над поверхностью.
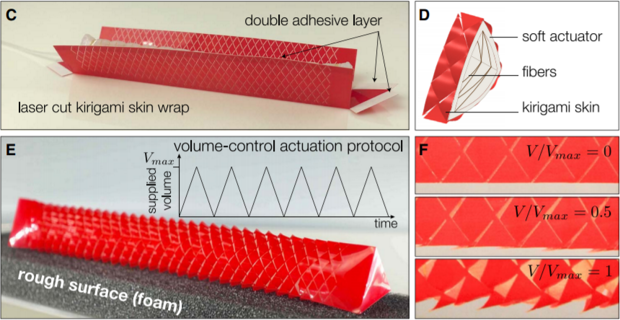
Во время движения робот надувает и сдувает воздушную камеру с помощью насоса. Но за счет необычной поверхности робот не остается на месте, а при надувании отталкивается задней частью и толкает переднюю вперед, а при сдувании наоборот зацепляется «чешуйками» передней части и подтягивает заднюю.

Всего было протестировано несколько видов вырезов: треугольные, полукруглые и трапециевидные. Было решено остановиться на форме трапеции, потому что в ходе эксперимента она показала наибольшую длину шага. Разработчики создали несколько прототипов робота и показали, как один из них может без внешнего питания передвигаться как по горизонтальным, так и по наклонным поверхностям.
Выделите ее и нажмите Ctrl + Enter